
Dans ce article nous allons voir comment utiliser la Data Augmentation et le Dropout pour améliorer un modèle classique de Deep Learning pour la classification d’images !
Nous allons utiliser notre modèle pour classifier des images de chiens et de chats bien qu’il soit utilisable sur n’importe quel jeu de données.
Le code complet est disponible sur GitHub à cet adresse.
L’objectif de ce notebook est de créer un modèle de Deep Learning capable de repérer sur une image un chien ou un chat. Le modèle aura seulement deux types de réponse : ‘chien’ ou ‘chat’, c’est donc une classification binaire.
Nous allons prendre un petit jeu de donnés (4000 images) intentionnellement pour que le modèle ne soit pas optimal. Cela nous permettra de voir comment améliorer notre modèle malgré cette contrainte.
Entraîner le modèle CNN
Charger les données
Tout d’abord nous allons charger sur le notebook le fichier zip contenant les images de chats et de chiens dont nous avons besoin.
Ces images sont des données à 3 dimensions:
- hauteur
- longueur
- couleur (Rouge, Vert, Bleu)
Où chaque couleur (RVB) est représenté sur une échelle de nuance de 0 à 255.
Le fichier contenant nos images se trouve sur Github
!git clone https://github.com/tkeldenich/Computer_Vision_CNN_DataAugmentation.gitOn dézip le fichier :
from zipfile import ZipFile
with ZipFile('/content/Computer_Vision_CNN_DataAugmentation/images.zip', 'r') as zipObj:
zipObj.extractall('images')Ce fichier contient plusieurs sous-fichiers hiérarchisés:
- train, pour l’entraînement du modèle
- validation, pour vérifer si le modèle est overfit
- test, pour tester le modèle
Chacun de ces fichiers contient un répertoire cats (chats) et un répertoire dogs (chiens).
Cela permet de savoir directement à quel label (chat ou chien) une image fait référence. Ces répertoires seront utiles notamment lors de la labellisation faite dans la partie Générateur & Preprocessing.
Pour chaque fichier, on crée une variable contenant le chemin du fichier.
train_dir = 'images/train/'
validation_dir = 'images/validation/'
test_dir = 'images/test/'
train_cats_dir = 'images/train/cats'
train_dogs_dir = 'images/train/dogs'
validation_cats_dir = 'images/validation/cats'
validation_dogs_dir = 'images/validation/dogs'
test_cats_dir = 'images/test/cats'
test_dogs_dir = 'images/test/dogs'On peut par la suite afficher la nombre d’images de chaque fichier pour voir si l’on en a bien 4000.
import os
print('total training cat images:', len(os.listdir(train_cats_dir)))
print('total training dog images:', len(os.listdir(train_dogs_dir)))
print('total validation cat images:', len(os.listdir(validation_cats_dir)))
print('total validation dog images:', len(os.listdir(validation_dogs_dir)))
print('total test cat images:', len(os.listdir(test_cats_dir)))
print('total test dog images:', len(os.listdir(test_dogs_dir)))Les générateurs
Une fois que les données sont chargés dans notre environnement nous allons les insérer dans des variables… mais pas n’importe quelles variables.. des générateurs !
En fait les générateurs sont des fonctions dans lequel on stocke des variables, des éléments ou encore des images.
L’avantage des générateurs c’est qu’ils ne calculent pas la valeur de chaque élément. En effet, ils calculent les éléments uniquement lorsqu’on leur demande de le faire. C’est ce qu’on appelle une évaluation paresseuse (lazy evaluation).
Cette évaluation paresseuse est utile lorsque l’on a un très grand nombre de données à calculer. Elle permet d’utiliser immédiatement les données déjà calculées, pendant que le reste des données est en cours de calcul.
Les générateurs permettent donc un gain de rapidité et d’espace mémoire !
Cette méthode est particulièrement pratique pour l’entraînement d’un modèle de Deep Learning qui fonctionne sur des lots de donnée(batch). Les lots sont chargés seulement lorsque le modèle en a besoin (par itération).
Dans notre cas, on va utiliser la fonction ImageDataGenerator qui permet d’initialiser des générateurs Python pour charger des images.
ImageDataGenerator permet aussi de redimensionner les valeurs RVB.
C’est une méthode idéal qui permet au modèle d’être plus précis. Nous allons donc redimensionner cette échelle de 0 à 255 en 0 à 1.
from keras.preprocessing.image import ImageDataGenerator
datagen = ImageDataGenerator(rescale=1./255)Preprocessing
On a initialisé nos générateurs, maintenant il faut leur indiquer où chercher nos images !
Pour cela, on utilise la fonction flow_from_directory qui permet de charger des lots de données depuis un chemin de fichier.
Cette fonction a de nombreux paramètres qui nous facilite vraiment la tâche, on peut remercier ceux qui l’ont codé !
Les paramètres que l’on utilise :
- le chemin du fichier, que l’on a déjà stocké dans des variables plus tôt
- batch_size, la taille du lot d’images à charger. Ici on choisit des lots de 20 images.
- target_size, le générateur peut redimensionner automatiquement la hauteur et la largeur des images chargés. On choisit une dimension petite de 150×150 pour que le modèle s’entraîne plus rapidement
- class_mode, ce paramètre permet de choisir le type de labellisation que l’on veut. Dans notre cas, nous voulons détecter le label ‘chien’ ou ‘chat’. Soit l’un, soit l’autre. C’est donc une classification binaire, on utilise donc ‘binary’ !
Ces quatres paramètres nous suffisent mais il en existe bien d’autre si l’on veut pousser davantage la configuration de nos générateurs, n’hésitez pas à regarder la documentation pour en apprendre plus !
train_generator = datagen.flow_from_directory(train_dir,
batch_size=20,
target_size=(150, 150),
class_mode='binary')
validation_generator = datagen.flow_from_directory(validation_dir,
batch_size=20,
target_size=(150, 150),
class_mode='binary')On peut vérifier que les lots d’images créés correspondent aux dimensions voulu en utilisant la fonction shape.
for data_batch, labels_batch in train_generator:
print('data batch shape:', data_batch.shape)
print('labels batch shape:', labels_batch.shape)
breakOn a bien des lots de 20 images de dimensions 150x150x3 et des lots de 20 labels, ‘chien’ ou ‘chat’, un pour chaque image.
Construire le modèle
Nos données sont prétraités, nous pouvons maintenant construire notre modèle !
On travaille avec des images, nous allons donc utilisé un modèle à couches de convolution comme expliqué dans cet article.
Le nombre de couches dépend de la complexité du problème et de la taille des images. Ici, quatre couches MaxPooling sont suffisantes.
Reste à savoir quelle fonction d’activation utiliser. Il suffit de se référer à cet article pour savoir rapidement quelle fonction est pertinente.
Dans notre cas, on utilise la fonction sigmoid dans la dernière couche de notre modèle pour faire de la classification binaire.
from keras import layers
from keras import models
model = models.Sequential()
model.add(layers.Conv2D(32, (3, 3), activation='relu',
input_shape=(150, 150, 3)))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(64, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(128, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(128, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Flatten())
model.add(layers.Dense(512, activation='relu'))
model.add(layers.Dense(1, activation='sigmoid'))Ensuite, nous pouvons compiler notre modèle, configuer son apprentissage.
On choisit comme loss function ‘binary_crossentropy’, comme optimisateur RMSprop et la métrique ‘acc’ pour accuracy (précision).
Nous n’avons pas encore écrit d’articles aux sujets de ces fonctions mais ça ne saurait tarder ! 🙂
from keras import optimizers
model.compile(loss='binary_crossentropy',
optimizer=optimizers.RMSprop(lr=1e-4),
metrics=['acc'])Entraîner le modèle
On entraîne le modèle avec la fonction fit_generator(), c’est le même principe que la fonction fit() mais adapté aux générateurs.
On choisit ces paramètres pour l’entraînement :
- le chemin du fichier contenant les données d’entraînement
- le nombre d’epoch, le nombre de fois que le modèle repasse sur l’ensemble de données
- steps_per_epoch, est en fait similaire a batch_size, ici 100 steps_per_epoch correspond à un batch_size de 20 (nombre de données d’entraînement divisé par nombre de steps_per_epoch)
- le chemin du fichier contenant les données de validation (pour évaluer l’overfitting du modèle)
- validation_steps, c’est le nombre de steps_per_epoch après lequel le modèle se test sur les données de validation
On peut résumer ces paramètres ainsi : le modèle s’entraîne 30 fois sur l’ensemble de données. Chaque fois qu’il s’entraîne, les données sont divisés en 100 lots (batch) sur lesquels il se focalise un à un. À chaque fois qu’il a visité 50 lots, il teste son apprentissage sur l’ensemble des données de validation.
Pour cet entraînement il est conseillé d’avoir un GPU, sinon d’utiliser le GPU intégré à Google Colab (gratuit).
history = model.fit_generator(
train_generator,
steps_per_epoch=100,
epochs=30,
validation_data=validation_generator,
validation_steps=50)
On ne l’a pas vu précédemment, mais il est toujours conseillé de sauvegarder notre modèle après l’apprentissage, cela permet d’éviter de recommencer l’entraînement à chaque nouvelle session.
Au fait, si ton objectif est d'apprendre le Deep Learning - j’ai préparé pour toi le Plan d’action pour Maîtriser les Réseaux de neurones.
7 jours de conseils gratuits d’un ingénieur spécialisé en Intelligence Artificielle pour apprendre à maîtriser les réseaux de neurones à partir de zéro :
- Planifie ton apprentissage
- Structure tes projets
- Développe tes algorithmes d’Intelligence Artificielle
J’ai basé ce programme sur des faits scientifiques, des approches éprouvées par des chercheurs mais également mes propres techniques que j'ai conçues au fil de mes expériences dans le domaine du Deep Learning.
Pour y accéder, clique ici :
À présent, on peut revenir à ce que je mentionnais précédemment.
Vous pouvez le sauvegarder facilement avec la fonction save() et lors d’une nouvelle session vous pourrez le charger avec la fonction load_model().
model.save('model_trained.h5')
#model = model.load_model('model_trained.h5')Évaluer le modèle
On évalue notre modèle en comparant les métriques, les courbes de loss et les courbes de précision.
import matplotlib.pyplot as plt
acc = history.history['acc']
val_acc = history.history['val_acc']
loss = history.history['loss']
val_loss = history.history['val_loss']
epochs = range(1, len(acc) + 1)
plt.plot(epochs, acc, 'bo', label='Training acc')
plt.plot(epochs, val_acc, 'b', label='Validation acc')
plt.title('Training and validation accuracy')
plt.legend()
plt.figure()
plt.plot(epochs, loss, 'bo', label='Training loss')
plt.plot(epochs, val_loss, 'b', label='Validation loss')
plt.title('Training and validation loss')
plt.legend()
plt.show()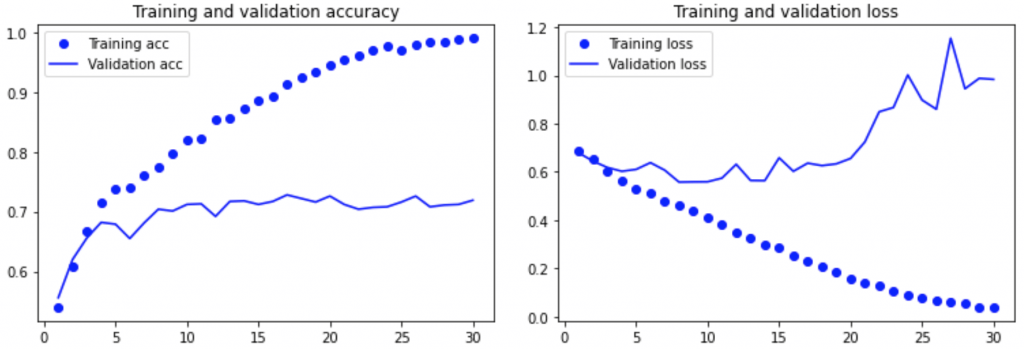
Sur les données d’entraînement, le modèle est de plus en plus performant mais sur les données de validation il stagne, voir devient de moins en moins bon.
Le modèle se spécialise sur les données d’entraînement mais n’est plus capable d’interpréter les données de validations (et les données réelles en général), il est en overfitting.
Essayons notre modèle sur les données de test :
test_generator = datagen.flow_from_directory(
test_dir,
target_size=(150, 150),
batch_size=20,
class_mode='binary')
model.evaluate(test_generator)La précision est de 0.74, les perfomances sont bonnes mais pas exceptionnelles.
Pas de soucis, on peut améliorer notre modèle !
Contourner l’overfitting
Data Augmentation
Qu’est-ce que c’est ?
L’overfitting est dû au fait que l’on dispose de trop peu de données.
Le modèle a trop peu de cas d’usage différent ce qui rend difficile son entraînement. Par conséquent il ne peut pas développer des règles de décisions pouvant être généralisé à de nouvelles données.
Il nous faut plus de données… et donc dans notre cas, plus de photos. Ce n’est pas une tâche facile a faire.
Heureusement, il existe une technique pour augmenter notre nombre de données. On peut créer des images artificielles grâce à la Data Augmentation (littéralement : l’augmentation des données).
L’idée derrière la Data Augmentation est de reproduire les données préexistantes en leur appliquant une transformation aléatoire. Par exemple, appliquer un effet mirroir sur une image.
Lors de l’entraînement, notre modèle apprendra sur beaucoup plus de données tout en ne rencontrant jamais deux fois la même image.
Le modèle est donc exposé à davantage de données. Cela lui permet de mieux généraliser.
Vérifions cela maintenant ! 😉
Comment l’utiliser ?
On peut faire de la Data Augmentation en utilisant la fonction ImageDataGenerator déjà utilisé plus haut et en modifiant certains paramètres :
- rotation_range pour faire pivoter une image de façon aléatoire sur une plage entre 0 et la valeur choisis (maximum 180 degré)
- width_shift et height_shift sont des plages (en fraction de la largeur ou de la hauteur totale) à l’intérieur desquelles on peut redimensionner aléatoirement des images verticalement ou horizontalement.
- shear_range est une plage permettant de rogner(découper) de manière aléatoire l’image
- zoom_range permet de zoomer de manière aléatoire à l’intérieur des images
- horizontal_flip retourne horizontalement des images de manière aléatoire (certaines seront retourner d’autres non)
- fill_mode est la stratégie utilisée pour remplir les pixels nouvellement créés, qui peuvent apparaître après un pivotage, un rognage, etc
On utilise ces quelques paramètres mais encore une fois, il en existe d’autres sur la documentation Keras !
augmented_datagen = ImageDataGenerator(
rotation_range=40,
width_shift_range=0.2,
height_shift_range=0.2,
shear_range=0.2,
zoom_range=0.2,
horizontal_flip=True,
fill_mode='nearest')Ensuite, on peut afficher ces nouvelles images pour voir concrétement ce qu’a produit notre Data Augmentation.
from keras.preprocessing import image
fnames = [os.path.join(train_cats_dir, fname) for
fname in os.listdir(train_cats_dir)]
img_path = fnames[4]
img = image.load_img(img_path, target_size=(150, 150))
x = image.img_to_array(img)
x = x.reshape((1,) + x.shape)
i=0
fig = plt.figure(figsize=(7,7))
for batch in augmented_datagen.flow(x, batch_size=1):
ax = fig.add_subplot(2,2,i+1)
ax.imshow(image.array_to_img(batch[0]))
i += 1
if i % 4 == 0:
break
plt.show()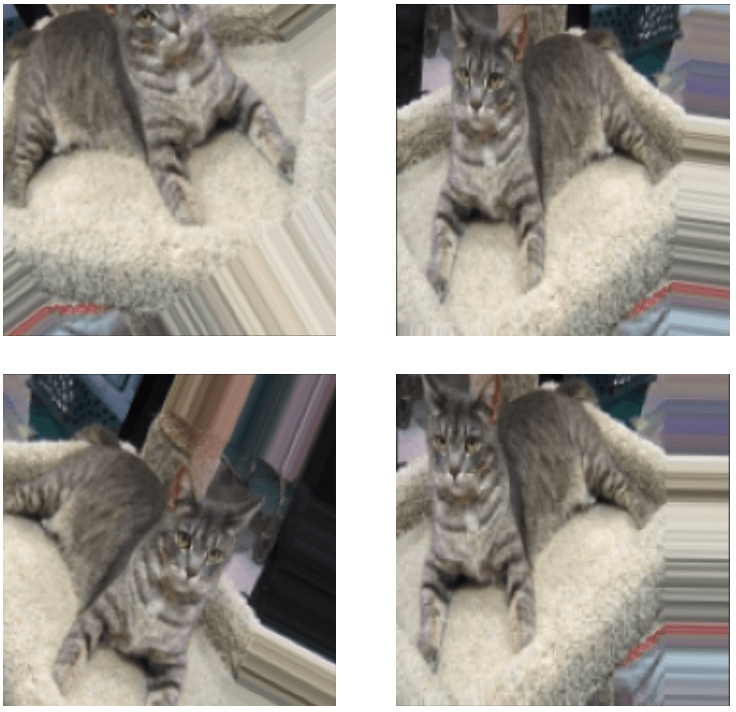
Pour visualiser les images augmentées, on a appliqué le paramètre fill_mode mais pour l’entraînement du modèle il n’est pas nécessaire de l’utiliser.
On initialise donc un générateur sans ce paramètre.
augmented_datagen = ImageDataGenerator(
rescale=1./255,
rotation_range=40,
width_shift_range=0.2,
height_shift_range=0.2,
shear_range=0.2,
zoom_range=0.2,
horizontal_flip=True,)La Data Augmentation concerne seulement les données d’entraînement… pour les autres données on initialise un générateur simple !
datagen = ImageDataGenerator(rescale=1./255)Ensuite, comme pour le premier entraînement, on indique le chemin des fichiers contenant nos images aux deux générateurs et on configure le preprocessing a effectuer.
train_generator = augmented_datagen.flow_from_directory(
train_dir,
target_size=(150, 150),
batch_size=20,
class_mode='binary')
validation_generator = datagen.flow_from_directory(
validation_dir,
target_size=(150, 150),
batch_size=20,
class_mode='binary')Une étape de vérification des dimensions, toujours utile:
for data_batch, labels_batch in train_generator:
print('data batch shape:', data_batch.shape)
print('labels batch shape:', labels_batch.shape)
breakDropout
Le modèle ne verra jamais deux fois la même donnée mais certaines images qu’il voit sont fortement similaires. Les données sont corrélées car elles proviennent d’un petit nombre d’images de base. Avec la Data Augmentation on ne peut pas produire de nouvelles informations, on peut seulement remanier, remixer des informations existantes.
Cela peut ne pas être suffisant pour se débarrasser complètement de l’overfitting. On va donc utilisez une deuxième technique: le Dropout.
Dans un modèle de Deep Learning, chaque couche du réseau apprend lors de la phase d’entraînement du modèle.
Lors de cet entraînement, des poids sont associés aux neurones de chaque couche.
Ces poids représentent l’apprentissage du modèle. Plus ils sont élevés, plus le neurone a d’influence sur la donnée.
L’idée du Dropout est de supprimer aléatoirement certains de ces neurones et donc supprimer les poids associés. Cela peut paraître paradoxale mais cette technique permet d’améliorer l’apprentissage du modèle.
En écartant certains neurones lors de l’apprentissage, les autres neurones sont contraint de se surpasser pour que la couche donne de bon résultats.
En fait, on ajoute du bruit pendant l’apprentissage du modèle ce qui a pour effet de contraindre les neurones restant à être plus robuste et donc plus performant. Le réseaux de neurones s’adapte à la situation !
Le Dropout est une couche a part entière. L’idée est de l’utiliser après avoir configuré les couches convolutionnelles (MaxPooling2D et Flatten).
model = models.Sequential()
model.add(layers.Conv2D(32, (3, 3), activation='relu',
input_shape=(150, 150, 3)))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(64, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(128, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Conv2D(128, (3, 3), activation='relu'))
model.add(layers.MaxPooling2D((2, 2)))
model.add(layers.Flatten())
model.add(layers.Dropout(0.5))
model.add(layers.Dense(512, activation='relu'))
model.add(layers.Dense(1, activation='sigmoid'))
model.compile(loss='binary_crossentropy',
optimizer=optimizers.RMSprop(lr=1e-4),
metrics=['acc'])Entraîner le nouveau modèle
On entraîne notre modèle avec la fonction fit_generator() mais cette fois avec 100 epochs car on sait que le modèle ne va pas overfitter rapidement grâce à la Data Augmentation et au Dropout.
history = model.fit_generator(
train_generator,
steps_per_epoch=100,
epochs=100,
validation_data=validation_generator,
validation_steps=50)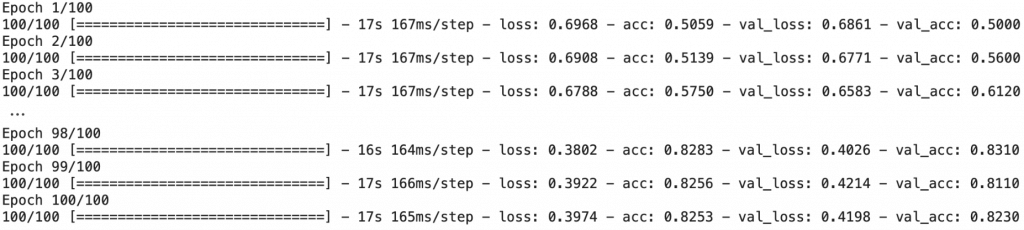
Ensuite, on sauvegarde notre nouveau modèle.
model.save('model_trained_enhanced.h5')
#model = model.load_model('model_trained_enhanced.h5')Et on trace les courbes de précision et de loss pour vérifier si le modèle overfit !
acc = history.history['acc']
val_acc = history.history['val_acc']
loss = history.history['loss']
val_loss = history.history['val_loss']
epochs = range(1, len(acc) + 1)
plt.plot(epochs, acc, 'bo', label='Training acc')
plt.plot(epochs, val_acc, 'b', label='Validation acc')
plt.title('Training and validation accuracy')
plt.legend()
plt.figure()
plt.plot(epochs, loss, 'bo', label='Training loss')
plt.plot(epochs, val_loss, 'b', label='Validation loss')
plt.title('Training and validation loss')
plt.legend()
plt.show()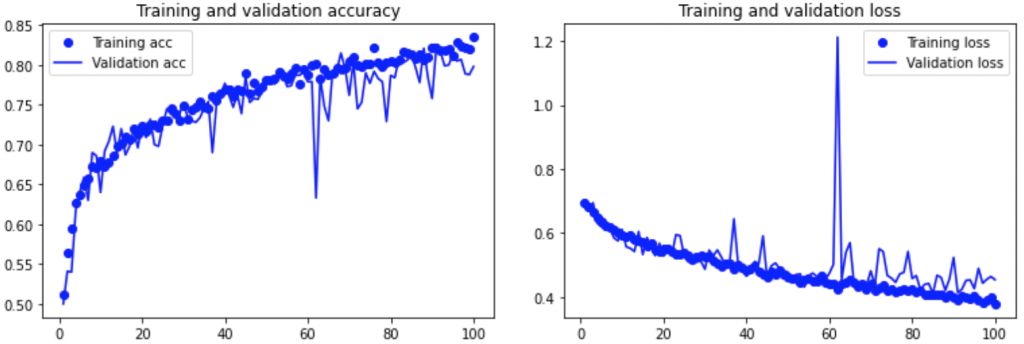
Le modèle overfit beaucoup moins et beaucoups moins vite, nos deux techniques ont donc bien marché ! 🙂
On vérifie cela sur nos données de test :
test_generator = datagen.flow_from_directory(
test_dir,
target_size=(150, 150),
batch_size=20,
class_mode='binary')
model.evaluate(test_generator)Une perte de 0.46 et une précision 0.79, on a réussi a améliorer notre modèle.
Il est toujours possible de faire mieux alors n’hésitez pas à reprendre le code et le modifier par vous-même.
Pour être autonome, il est important d’avoir – les bonnes connaissances !
Si tu veux approfondir tes connaissances dans le domaine, tu peux accéder à mon Plan d’action pour Maîtriser les Réseaux de neurones.
Un programme de 7 cours gratuits que j’ai préparé pour te guider dans ton parcours pour apprendre le Deep Learning.
Si ça t’intéresse, clique ici :
Un dernier mot, si tu veux aller plus loin et apprendre le Deep Learning - j’ai préparé pour toi le Plan d’action pour Maîtriser les Réseaux de neurones.
7 jours de conseils gratuits d’un ingénieur spécialisé en Intelligence Artificielle pour apprendre à maîtriser les réseaux de neurones à partir de zéro :
- Planifie ton apprentissage
- Structure tes projets
- Développe tes algorithmes d’Intelligence Artificielle
J’ai basé ce programme sur des faits scientifiques, des approches éprouvées par des chercheurs mais également mes propres techniques que j'ai conçues au fil de mes expériences dans le domaine du Deep Learning.
Pour y accéder, clique ici :



